[GAMES 101] Transformation 筆記
為了使得位移運算可以通過矩陣乘法表達,我們使用齊次座標系統來表示三維座標中的點與向量。
也就是說:
一般來說,若用 $(x,y,z,w)$ 表示一個點時 (其中 $w\neq 0$),該點座標為: $\left( \frac{x}{w}, \frac{y}{w}, \frac{z}{w} \right)$。請記住這個結論,這對之後推導透視投影的矩陣很重要。
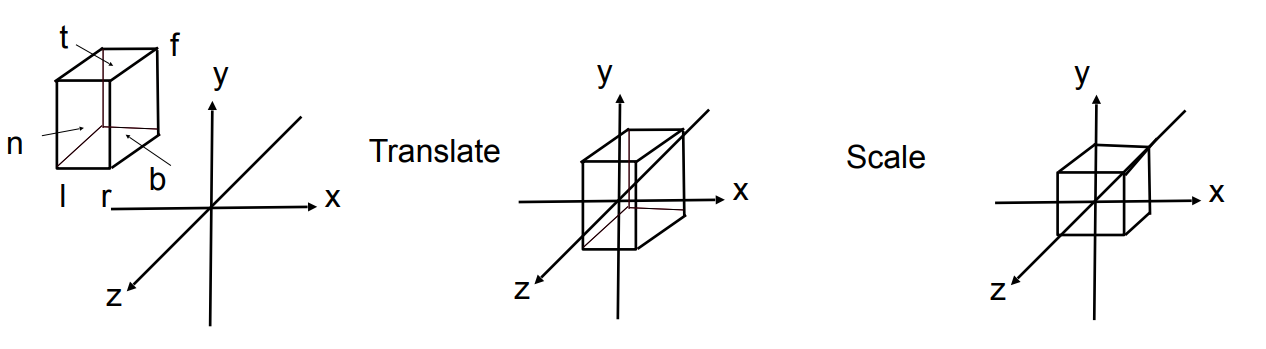
一個三維的縮放矩陣有如下形式:
位移矩陣:
而三維的旋轉我們表達成對於 $x,y,z$ 三軸各自的旋轉:
首先注意對於 $x,z$ 軸的旋轉矩陣,可以看出其實就是保持自己 ($x$ 或 $y$ 軸) 不變,然後對其他兩軸做二維旋轉。
比較特殊的是 $y$ 軸,可以看出它其實對其他二軸做了 $-\alpha$ 的二維旋轉。理由是這樣的,因為 $\mathbf{x}\times \mathbf{y}=\mathbf{z}$,且 $\mathbf{y}\times \mathbf{z}=\mathbf{x}$,但是 $\mathbf{x}\times \mathbf{z}=-\mathbf{y}$。這就是為甚麼旋轉 $-\alpha$ 的原因,我們要反著轉才能使得正確的旋轉到需要的角度。
如果我們看到形如:
的變換矩陣,我們是先應用了線性變換還是位移?
這邊直接說答案,是先位移,然後應用線性變換。如果不相信可以自己驗證看看。
View / Camera Transformation
想將一堆三維座標或向量轉換到電腦螢幕上,需要經過以下三個矩陣的變換:
- Model transformation:將模型從局部空間轉換到世界空間。
- View transformation:將世界空間轉換到攝像機空間
- Projection transformation:將攝像機空間中的視錐體映射到標準裁減空間。
我們現在聚焦在 View transformation
定義一個相機的位置,我們需要三個向量:
- 相機的座標向量。
- 相機的朝向 (Look-at) 向量。
- 相機的頭頂向量,因為攝像機可以左右傾斜,如果指定義朝向則無法辨別傾斜角度。
但是,想要讓攝像機在場景中自由移動,實現上並不是特別方便。事實上,我們令攝像機位置固定在原點 $(0,0,0)$ 並朝向 $-z$,頭頂向量指向 $y$。當攝像機移動時,其實是整個場景往攝像機的相反方向移動。
所以,想要構建一個這樣的矩陣,這個矩陣要有如下變換流程:
- 將物體移動到原點。
- 將物體朝向與 $-z$ 對齊。
- 將物體頭頂向量與 $y$ 對齊。
- 將物體朝向與頭頂向量的叉乘向量與 $x$ 對齊。
為了書寫方便,我們令物體位置為 $\vec{e}$,朝向 $\hat{g}$,頭頂向量 $\hat{t}$。並且 $M_{\text{view}}$ 為我們要求的變換矩陣。
總的來說,$M{\text{view}}$ 可以被寫成兩個矩陣相乘。一個 $T{\text{view}}$ 表示將物體移動到原點,一個 $R_{\text{view}}$ 將物體旋轉對齊到三根座標軸。
$T_{\text{view}}$ 很好求:
但是 $R{\text{view}}$ 不好求,考慮 $R{\text{view}}^{-1}$,也就是將三根座標軸旋轉到物體的對應三根向量上。我們可以較輕易的寫出這個矩陣:
我們通過修習線性代數,可以知道:一個單位矩陣的逆,就是該矩陣的轉置。
而一個旋轉矩陣因為有互相正交且長度為 $1$ 的 column vectors,所以旋轉矩陣是一個單位矩陣。
那麼我們有:$R{\text{view}}^{-1}=R{\text{view}}^{T}\implies R{\text{view}}=(R{\text{view}}^{-1})^{T}$。
所以:
如此一來,就可以通過下式算得 $M_{\text{view}}$:
Projection Transformation
Orthographic Transformation
這種投影方式比較容易實現,簡單來說就是將攝像機放到原點,看向 $-z$。然後將看到的所有東西的 $z$ 座標丟棄,並將所有東西縮放到 $[-1,1]^{2}$ 之間。
更一般的說,考慮下圖那樣的長方體。我們要將其放置到原點,然後縮放成邊長為 $2$ 的立方體。
需要注意到,因為面朝 $-z$,所以較近的面 $n$ 相對於較遠的面 $f$ 擁有更大的座標值。
我們可以較輕易的將這個矩陣表達出來:
Perspective Transformation
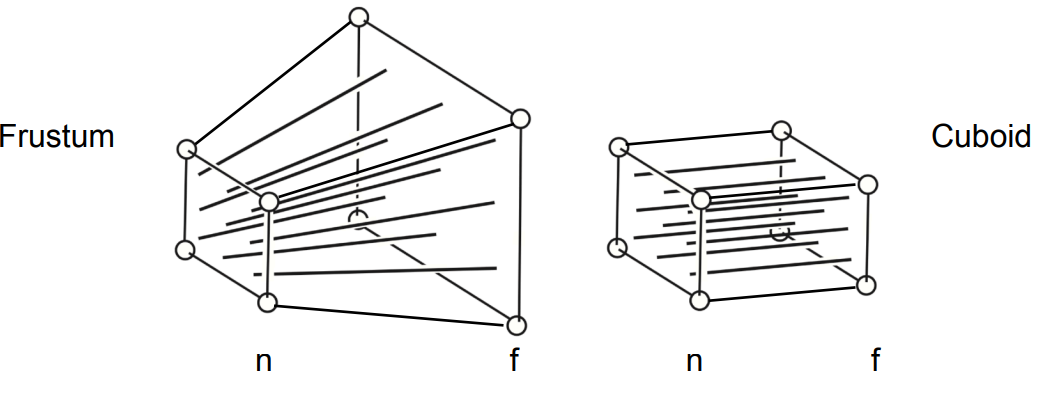
如果想要直接將一個錐體較遠的一面映射到較近的一面,直接思考並不容易。
考慮下圖,如果我們將較遠的面向內擠壓 (較遠的面的 $z$ 軸座標值不變,但不保證兩面之間任意一點的 $z$ 值保持不變),使得較近的面與較遠的面大小一致,我們就可以繼續套用上面求得的矩陣將其投影。
那我們應該如何知道要擠壓多少?考慮下圖,我們要使得 $y=y’$ 且 $x=x’$。
通過三角形相似,我們就可以得到結論 $y’=\frac{n}{z}y$ 且 $x’=\frac{n}{z}x$。
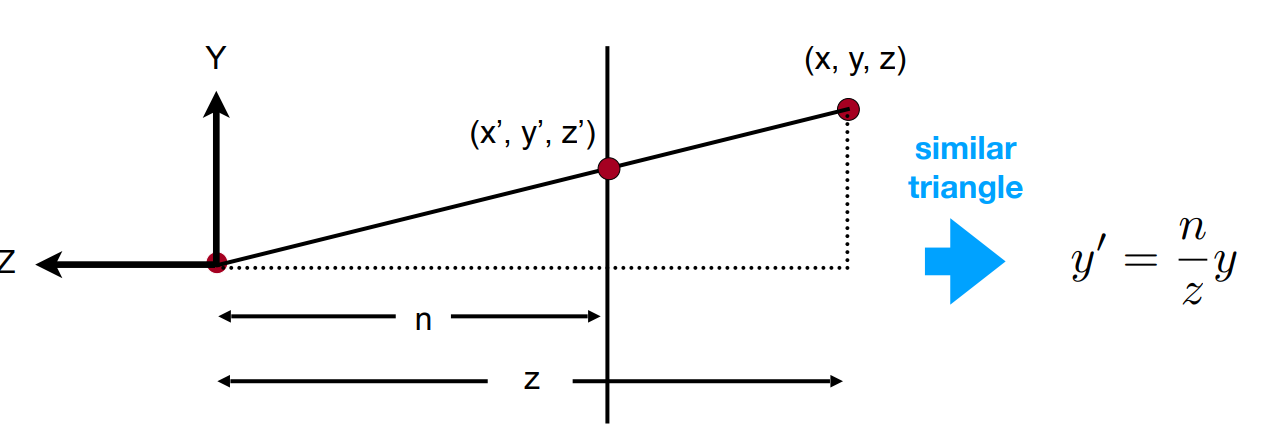
所以,在齊次座標上的任意點 $(x,y,z,1)^{T}$ 會被擠壓成 $\left( \frac{nx}{z}, \frac{ny}{z},\text{unknow},1 \right)$。
還記得用 $(x,y,z,w)$ 表示一個點時 (其中 $w\neq 0$),該點座標為 $\left( \frac{x}{w}, \frac{y}{w}, \frac{z}{w} \right)$ 嗎?
所以,我們可以乘 $z$,得到的座標仍代表同一個點:$\left( \frac{nx}{z}, \frac{ny}{z},\text{unknow},1 \right)^{T}=(nx,ny,\text{unknow},z)^{T}$。
根據現有條件,我們有:
再根據:
- 近平面的 $z$ 不會因為擠壓而改變。
- 遠平面的 $z$ 不會因擠壓而改變。
我們有帶入條件,近平面的 $z$ 不會因為擠壓而改變:
因為 $x$ 與 $y$ 與 $n$ 沒啥關係,所以 $\mathbf{e}_{3}^{T}M$ 就變為:
將兩個條件帶入:
就有:$A=n+f$ 與 $B=-nf$。
因為我們已經求得所有 $M_{\text{persp}\to\text{ortho}}$ 的元素,所以只需要套用下列公式就可以得到透視投影矩陣:



