CSAPP U7 筆記與(部分)練習題解答
編譯器驅動程序
考慮以下代碼:
1 | // main.c |
1 | // sum.c |
編譯系統提供編譯器驅動程序(compile driver),幫助用戶調用語言預處理器、編譯器、匯編器與鏈接器。
若要使用GNU編譯系統構造以上代碼,輸入以下指令:
1 | gcc -Og -o prog main.c sum.c |
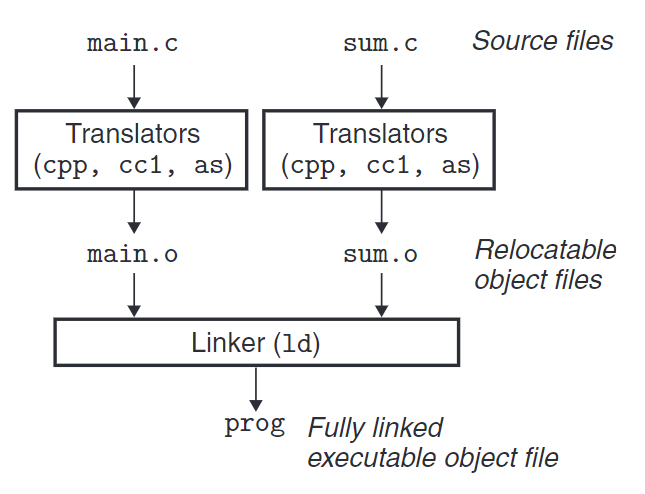
上圖蓋擴了驅動程序將代碼翻譯成可執行目標文件的行為。
驅動程序首先使用C預處理器(C preprocessor, cpp) 將main.c翻譯成ASCII碼的中間文件main.i:
1 | cpp [other arguments] main.c /tmp/main.i |
緊接著使用C編譯器(C compiler, cc1) 將main.i翻譯成匯編文件main.s:
1 | gcc -Og -S /tmp/main.i [other arguments] -o /tmp/main.s |
然後,使用匯編器(assembler, as) 將main.s翻譯成可重定位目標文件(relocatable object file) main.o:
1 | as [other arguments] -o /tmp/main.o /tmp/main.s |
通過同樣的過程生成sum.o,然後運行鏈接器程序ld創建一個可執行目標文件(executable object file) prog:
1 | gcc -o prog main.o sum.o |
靜態鏈接
如ld這樣的靜態鏈接器(static linker) 以一組可重定位目標文件和命令行參數作為輸入,生成一個完全鏈接且可以加載和運行的可執行目標文件作為輸出。
鏈接器完成兩個主要任務:
- 符號解析(symbol resolution):每個符號對應一個函數、全局變量或靜態變量。符號解析將每個符號引用和符號定義關聯起來。
- 重定位(relocation):編譯器和匯編器生成從地址開始的代碼和數據節,鏈接器通過把每個符號定義與一個內存位置關聯,從而重定位這些節,然後修改所有對這些符號的引用,使引用指向該內存地址。
目標文件
目標文件分三種:
- 可重定位目標文件
- 可執行目標文件
- 共享目標文件:在加載或運行時被動態地加載進內存並鏈接。
目標模塊(object module):一個字節序列。
目標文件(object file):以文件形式存放在磁盤中的目標模塊。
可重定位目標文件
我們可以通過以下指令生成可重定位目標文件(僅進行編譯和匯編,不執行鏈接):
1 | gcc -c main.c |
我們可以使用以下指令查看目標文件包含多少字節,其中-c代表字節:
1 | wc -c main.o |
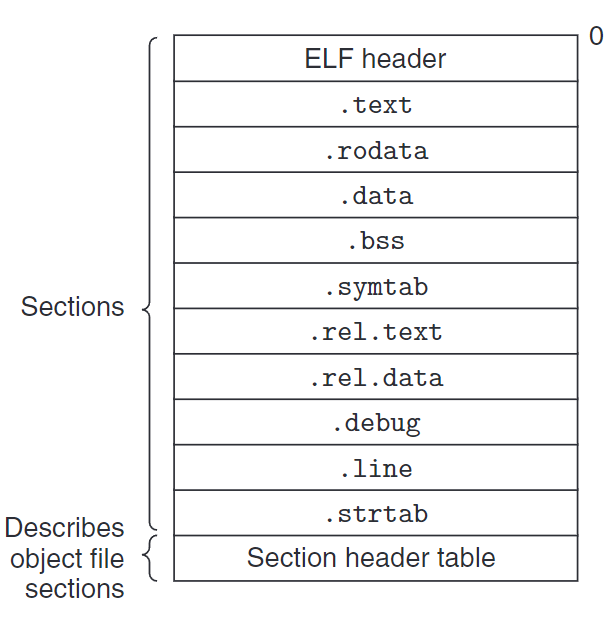
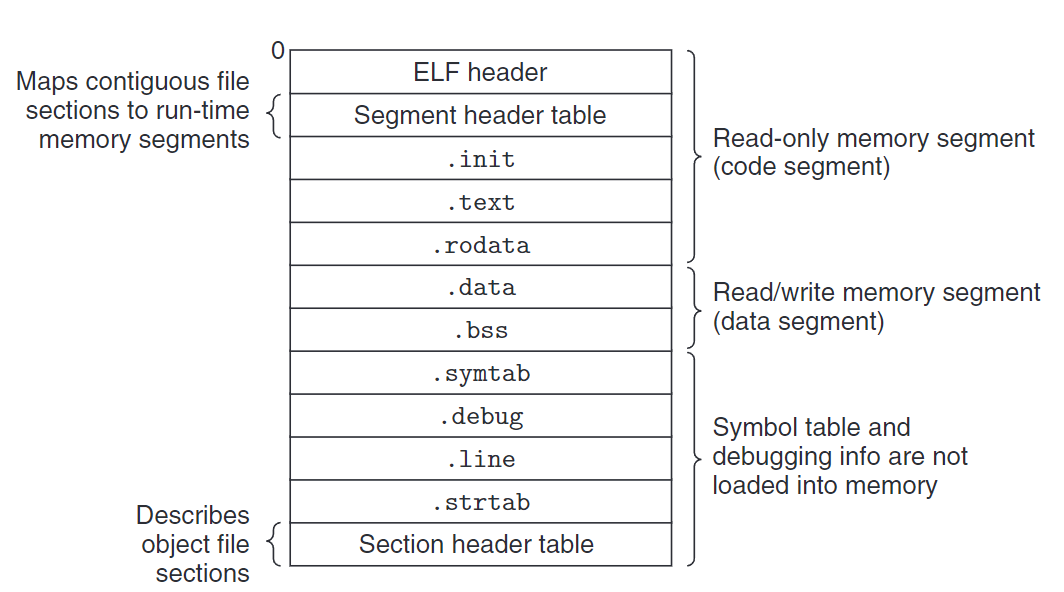
上圖是一個典型ELF文件。
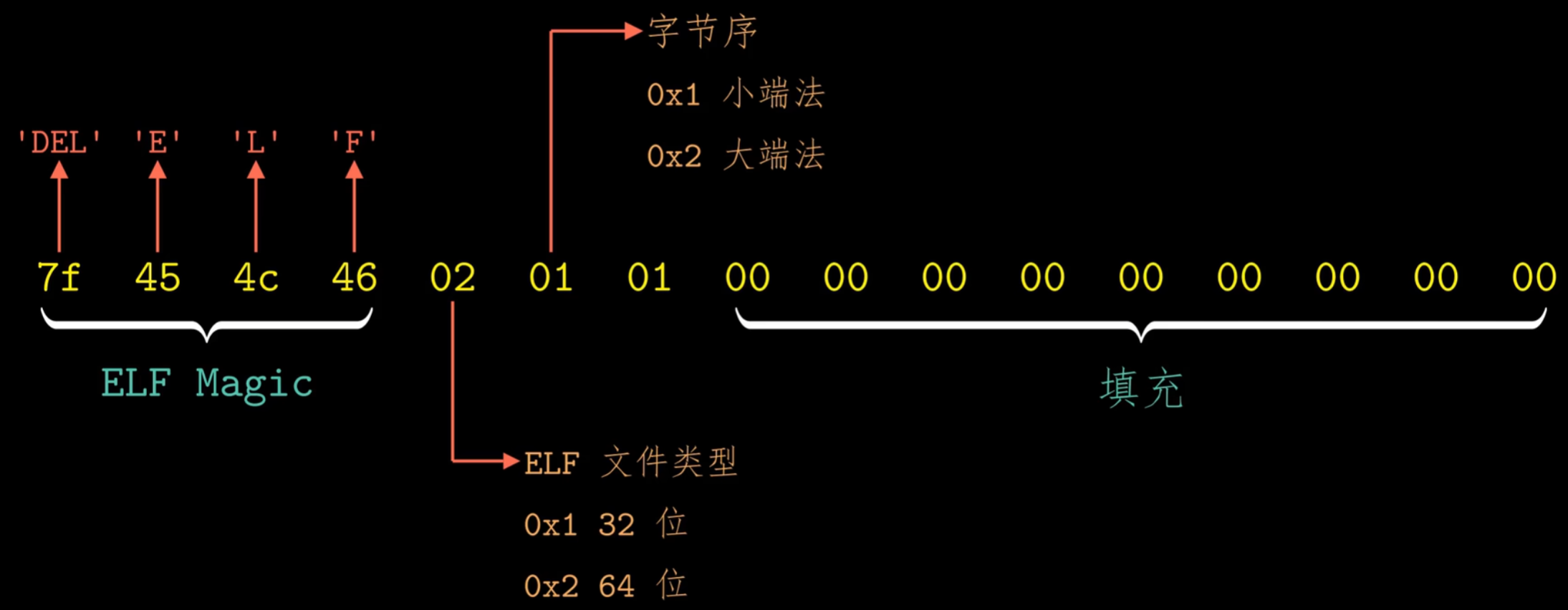
ELF頭(ELF header) 以一個16字節序列開始,內容如下:
我們可以使用以下指令查看ELF header中的具體內容:
1 | readelf -h main.o |
使用以下指令查看節頭部表中的具體信息:
1 | readelf -S main.o |
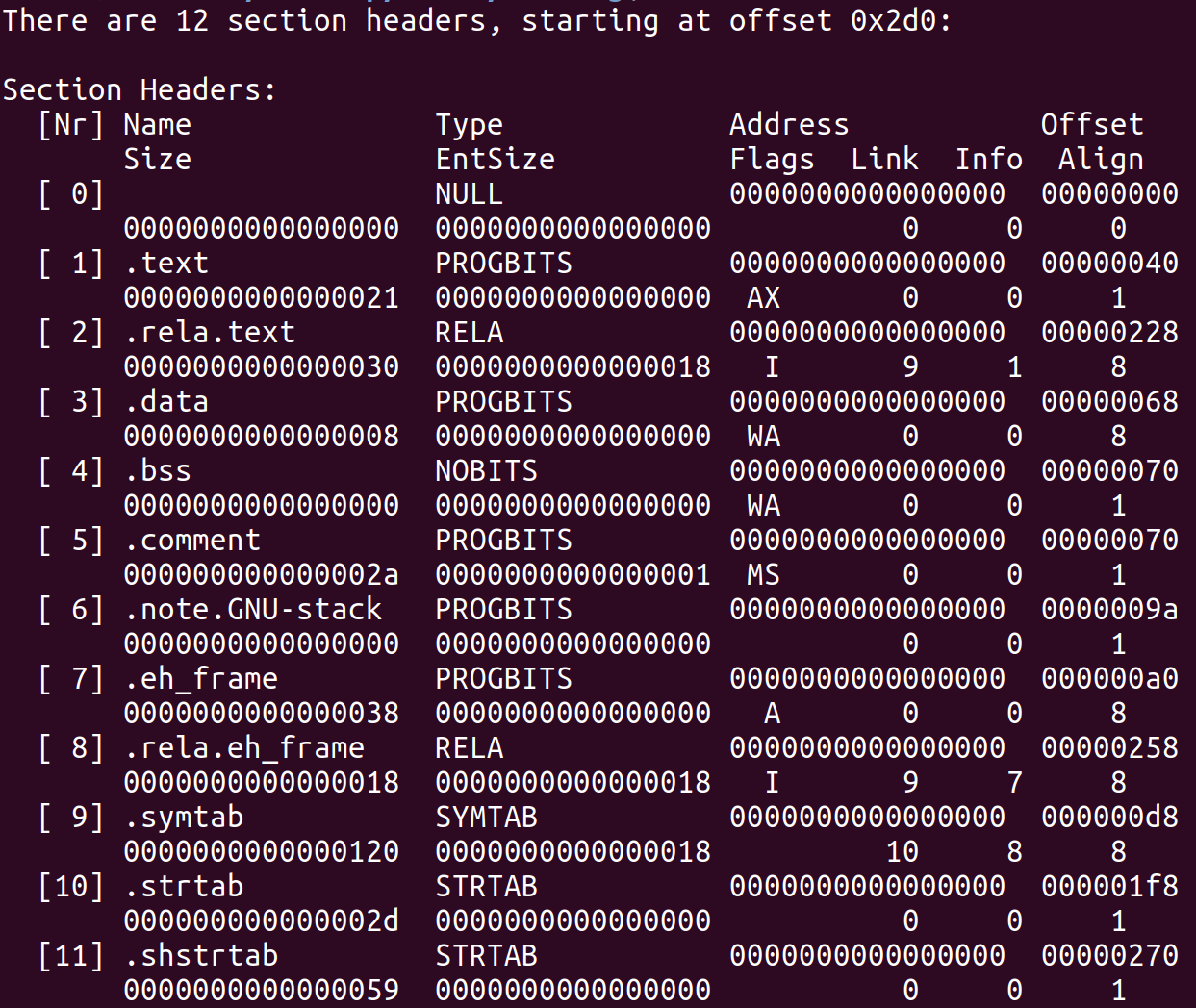
我們列點說明常用的節:
.text:存放已編譯的代碼。
.rodata:存放只讀數據,如printf中的格式串。
.data:已初始化的全局或靜態變量。
.bss:未初始化的全局或靜態變量,以及所有被初始化為零的全局或靜態變量。在目標文件中這個節不占空間,只是個佔位符。因為未初始化變量會在運行時在內存中分配這些變量並初始化零。
.symtab:符號表。
.rel.text:代碼重定位條目。
.rel.data:數據重定位條目。
.strtab:字符串表,包括.symtab節的符號表中各項的名字,以及節頭部中的節名字。
符號和符號表
在鏈接器上下文中,有三種不同的符號:
- 全局符號:由模塊定義且能被其他模塊引用的符號,對應非靜態的函數和全局變量。
- 外部符號:由其他模塊定義且能被模塊引用的全局符號,對應其他模塊中定義的非靜態函數和全局變量。
- 局部符號:由模塊定義但不能被其他模塊引用的符號,對應帶
static屬性的函數或全局變量。
我們可以使用以下指令查看符號表中的內容:
1 | readelf -s main.o |
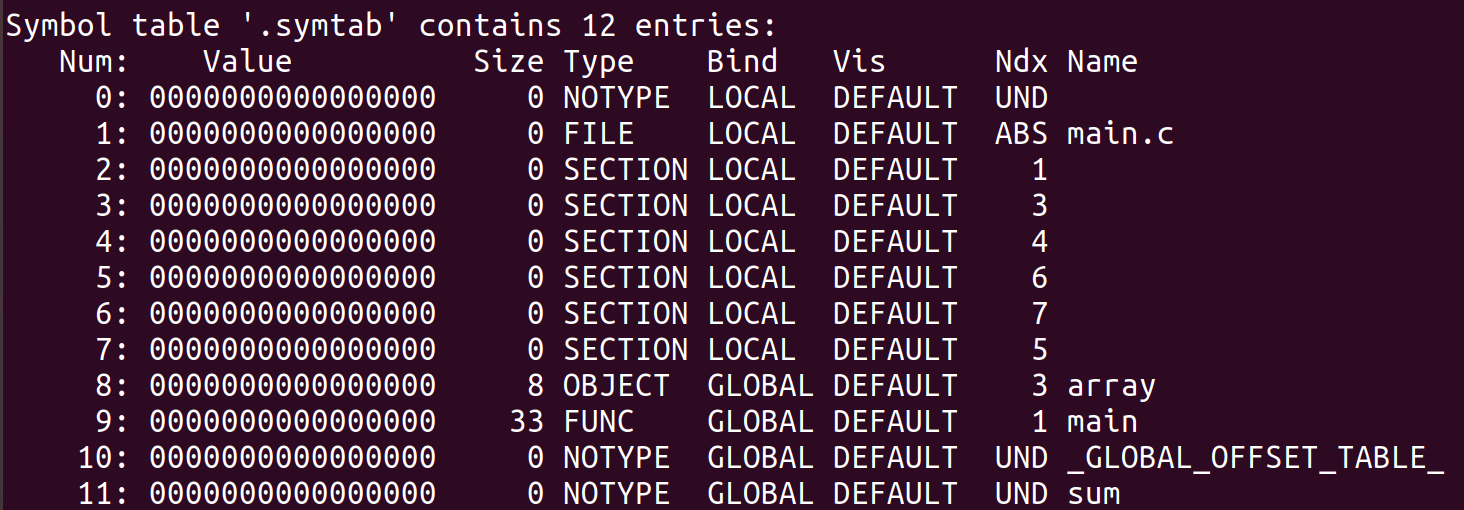
以下是符號表條目的數據結構:
1 | typedef struct { |
name:對應到.strtab的偏移,裡面存放著對應變量或函數名。
type:該項是函數還是變量。
binding:該項符號是局部還是全局的。
section:對應節頭部表的索引,指出該項存放在對應哪個節中。此項有三個特殊的偽節(pseudosection),它們在節頭部表中沒有對應條目。ABS表示不該被重定位的符號;UNDEF表示未定義的符號,即在本模塊引用但在其他模塊定義的符號;COMMON表示未初始化的數據。只有可重定位目標文件中才有這些偽節,可執行目標文件無。
value:相對於.text起始位置的偏移量。對於COMMON符號,給出對其要求。
size:目標的大小(字節)。對於COMMON符號,給出最小的大小。
gcc使用以下規則區分COMMON和.bss:
COMMON:未初始化的全局變量。(弱符號,後面會提到定義).bss:未初始化的靜態變量和初始化為零的全局或靜態變量。
練習題
7.1
| 符號 | .symtab條目? |
符號類型 | 在哪個模塊中定義 | 節 |
|---|---|---|---|---|
buf |
有 | 外部 | m.o |
.data |
bufp0 |
有 | 全局 | swap.o |
.data |
bufp1 |
有 | 全局 | swap.o |
COMMON |
swap |
有 | 全局 | swap.o |
.text |
temp |
無 |
符號解析
解析多重定義的全局符號
對於局部符號的引用,編譯器只允許每個模塊中每個局部符號只有一個定義。
但對於全局符號的引用就麻煩許多。編譯器遇到不是在當前模塊定義的符號時,會假設該符號在其他模塊定義從而生成一個鏈接器符號表條目,並交給鏈接器處理。
編譯時,編譯器像匯編器輸出全局符號與強弱。匯編器將符號的強弱隱含地編碼在可重定位目標文件中的符號表中。
強符號:函數和已初始化的全局變量。
弱符號:未初始化的全局變量。
根據強弱符號的定義,鏈接器使用以下規則處你多重定義的符號名:
- 不允許多個同名的強符號。
- 如果有一個強符號和多個弱符號同名,選擇強符號。
- 如果有多個弱符號同名,隨機選擇一個。
注意,第二和第三條規則容易帶來不意察覺的運行時錯誤。
1 | /* foo.c */ |
如果編譯鏈接以上兩程序,會輸出x = 54321。使得函數的運行與main編寫者的預期相悖。
若重複定義的符號是不同類型,會發生更無法預期的行為。
1 | /* foo5.c */ |
由於int是4字節而double是8字節,對double x的賦值可能會導致溢出到y而更改y的值。
而且此時鏈接器僅會觸發警告,所以很容易讓人們忽視,然而這是很危險的。
我們可以使用gcc -fno -common標誌調用鏈接器,告訴它當遇到多重定義的全局符號時觸發錯誤。或使用-Werror選項將所有警告視為錯誤。
回到上一節的內容,為何編譯器需要將符號分配為COMMON或.bss呢?
因為當編譯器遇到一個弱符號時,它並不知道其他模塊是否也定義了該符號,也無法知道鏈接器使用多重定義的哪一個。所以它把弱符號分配成COMMON,把決定權留給鏈接器。
而當編譯器遇到一個強符號時,因為強符號必須唯一,所以可以直接將其分配成.bss。同樣,靜態變量因為是局部符號所以必須唯一,也可以直接將其分配成.bss。
練習題
7.2
A.
(a) (main.1)
(b) (main.1)
B.
(a) 錯誤
(b) 錯誤
C.
(a) (x.2)
(b) (x.2)
靜態庫鏈接
編譯系統提供一種機制,把所有相關的目標模塊打包成一個單獨的文件,稱為靜態庫(static library),可作為鏈接器的輸入。
在Linux中,靜態庫以一種稱存檔(archive) 的文件格式存放在磁盤中。存檔文件是一組連接起來的可重定位目標文件的集合,後輟以.a標示。
考慮以下代碼
1 | /* addvec.c */ |
要創建靜態庫,我們使用ar:
1 | gcc -c addvec.c multvec.c |
為了使用這個庫,我們需要編寫一個頭文件定義libvector.a中的函數原型。
1 | /* vector.h */ |
1 |
|
為了編譯和鏈接main.o和libvector.a,輸入以下指令:
1 | gcc -c main2.c |
-static告訴編譯器驅動程序應該鏈接一個完全鏈接的可執行目標文件,它可以加載到內存並運行,在加載時無須進一步的鏈接。
用靜態庫解析引用
在符號解析階段,鏈接器從左到右掃描命令行中出現的可重定位目標文件和存檔文件。
同時,鏈接器維護三個集合。一個可重定位目標文件集合$E$(此集合內的文件會被合併成可執行文件),一個未解析符號集合$U$(引用了但還未定義),一個已定義符號集合$D$。初始時,三個集合皆為空。
鏈接器依照以下規則鏈接:
- 對命令行中每個輸入文件$f$,依照$f$為目標文件還是存檔文件區分。若$f$為目標文件,那麼鏈接器把$f$添加到$E$,並修改$U$和$D$來反映$f$的符號定義與引用。
- 若$f$為存檔文件,則鏈接器嘗試匹配$U$中未解析符號是否有由存檔文件成員定義的符號。若存檔文件成員$m$中意義了一個符號可用來解析$U$中的一個引用,則將$m$加入$E$中,並修改$U$和$D$來反映$m$中的符號定義和引用。遍歷$f$所有成員執行以上操作。之後任何不在$E$中的$f$成員目標文件都會被丟棄,不被鏈接。
- 若完成對命令行文件掃描後,$U$非空,則鏈接器輸出錯誤並終止。否則,合併與$E$中的目標文件並輸出可執行文件。
注意,命令行中文件出現的順序極為重要,否則這種算法會導致一些鏈接時錯誤。若定義符號的庫出現在符號引用的目標文件之前,那麼引用就無法被解析,鏈接就會失敗。
考慮以下命令:
1 | gcc -static ./libvector.a main2.c |
因為處理libvector.a時$U$是空的,所以沒有任何成員目標文件會被添加到$E$中。因此,對addvec的引用無法被解析,導致鏈接器產生錯誤信息。
對於庫的鏈接準則是將它們放在命令行的結尾。若各個庫的成員互相獨立(沒有成員引用另一個成員定義的符號),那麼這些庫就可以用任意順序放置在尾部。若不獨立,則需要對它們排序。若兩個庫相互依賴,則先出現的庫需要被引用兩次。比如foo調用1.a,且1.a和2.a相互依賴,則需要使用以下命令:
1 | gcc foo.c 1.a 2.a 1.a |
或者,將兩個互相依賴的庫合併成單獨的存檔文件。
練習題
7.3
A.
1 | gcc -static -Og -o prog p.o libx.a |
B.
1 | gcc -static -Og -o prog p.o libx.a liby.a |
C.
(錯誤)1
gcc -static -Og -o prog p.o libx.a liby.a libx.a p.o
(正確)1
gcc -static -Og -o prog p.o libx.a liby.a libx.a
因為p.o是目標文件,一定會被完整包含在可執行文件中,所以當libx.a需要尋找定義時,可以直接在全局符號表中找到,無須再次掃描p.o。
重定位
重定位由兩步組成:
- 重定位節和符號定義
- 重定位節中的符號引用
重定位條目
匯編器生成一個目標文件時,它不知道數據和代碼最終放在內存的哪個位置,也不知道引用的外部定義函數或全局變量的位置。所以,當匯編器遇到最終位置未知的目標引用就會生成一個重定位條目(relocation entry),告知鏈接器在合併時如何修改這個引用。
以下代碼展示了ELF重定位條目的格式:
1 | typedef struct { |
offset:需要被修改的引用的節偏移。
type:告知鏈接器如何修改引用。
symbol:標示被修改引用應指向的符號。
addend:有符號常數,某些類型的重定位需要它對修改的值做偏移。
ELF定義了32種重定位類型,以下我們著重關心兩種基本類型:
R_X86_64_PC32:重定位使用32位PC相對地址的引用,即相對尋址。R_X86_64:重定位使用32位絕對地址的引用,即絕對尋址。
重定位符號引用
以下代碼為鏈接器重定位算法的偽代碼:
1 | foreach section s { |
練習題
7.4
A. 0x4004df
B. 0x5
7.5
refaddr = 0x4004da
ADDR(swap) = 0x4004e8
0x4004e8 - 0x4004da - 4 = a
答:0xa
可執行目標文件
下圖展示了一個典型ELF可執行文件中的各類信息。
ELF頭描述文件總體格式且包含入口點(entry point)。
.init定義了一個函數,稱_init,程序初始化代碼會調用它。
因為程序是完全鏈接的(已被重定位),所以不再需要rel節。
程序頭部表(program header table) 描述了如何將可執行文件連續的片(chunk)映射到連續的內存段。

上圖展示了可執行文件prog的程序頭部表。
off:目標文件中的偏移。
vaddr/paddr:內存地址。
align:對齊要求。
filesz:目標文件中的段大小。
memsz:內存中的段大小。
flag:運行時訪問權限。
對於任何段$s$,鏈接器必須選擇一個起始地址vaddr,使得:
加載可執行目標文件
執行程序時,會調用稱為加載器(loader) 的操作系統代碼來運行。Linux程序可以通過調用函數execve來調用加載器。
加載器將可執行文件的代碼與數據複製到內存中,然後跳轉到程序的第一條指令或入口點(entry point, EP) 來運行該程序。這種將程序複製到內存並運行的行為稱加載。
每個程序都有一個運行時內存映像(run-time memory image),如下圖所示。
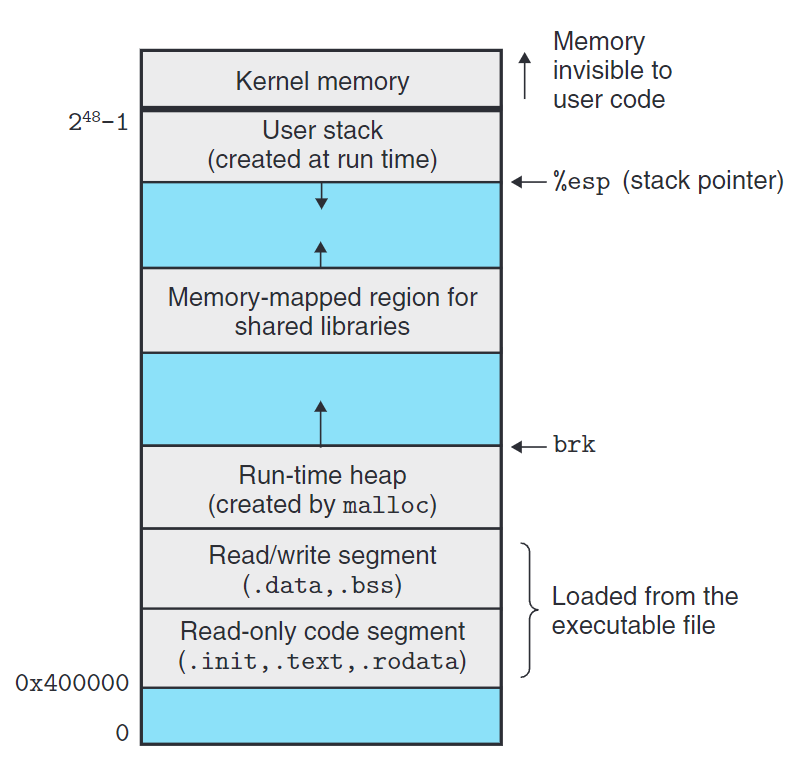
雖然圖中代碼段和數據段相鄰,但實際上.data段因為有對齊要求,所以代碼段與數據段間有間隙。
又因為ASLR,堆、共享庫和棧因為地址空間布局隨機化導致每次運行時地址皆不同,但是相對位置不變。
程序的EP是_start函數,此函數在ctrl.o中定義。它會調用系統啟動函數__libc_start_main,此函數定義在libc.so中。它會初始化執行環境,調用用戶層的main函數並處理main的返回值。
動態鏈接共享庫
共享庫(shared library,或稱共享目標 shared object) 是一個目標模塊,可以加載到任意內存地址,並和內存中的程序鏈接。此過程稱動態鏈接(dynamic linking),由動態鏈接器(dynamic linker) 執行。共享庫在Linux系統以.so後輟表示,在Windows系統中以.dll後輟表示。
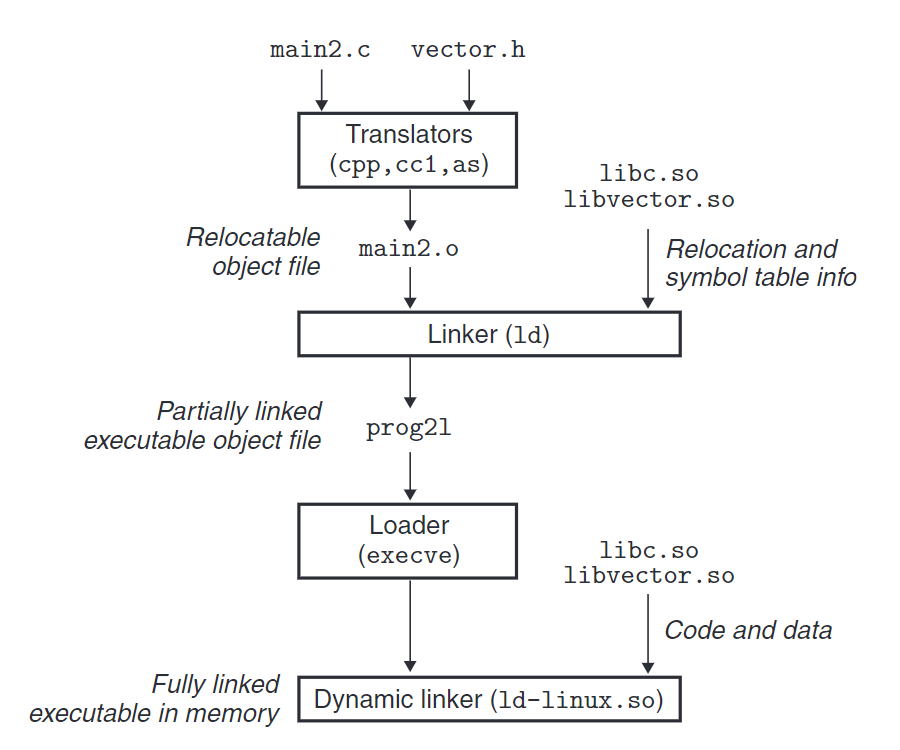
上圖展示了簡略的動態鏈接過程。
我們可以使用以下指令創建共享庫:
1 | gcc -shared -fpic -o libvector.so addvec.c multvec.c |
其中,-fpic表示生成與位置無關的代碼。
我們可以使用以下代碼鏈接共享庫:
1 | gcc -o prog21 main2.c ./libvector.so |
從程序中加載和鏈接共享庫
Linux為動態鏈接庫提供了接口,允許程序在運行時加載和鏈接共享庫:
1 |
|
flag參數一定要包含以下兩下之一:
RTLD_NOW:加載時立即解析庫中對外部符號的引用。RTLD_LAZY:推遲符號解析直到執行來自庫的代碼。
1 |
|
1 |
|
1 |
|
讓我們用以上提到的函數編寫一個示例代碼:
1 |
|
並如下編譯程序:
1 | gcc -rdynamic -o prog2r dll.c -ldl |
位置無關代碼
位置無關代碼(Position-Independent Code, PIC) 是可以加載而不用重定位的代碼,使得共享庫可以被加載到內存中的任意位置而無須鏈接器修改。通過這種方法,無限多個進程可以共享一個共享庫。
PIC數據引用
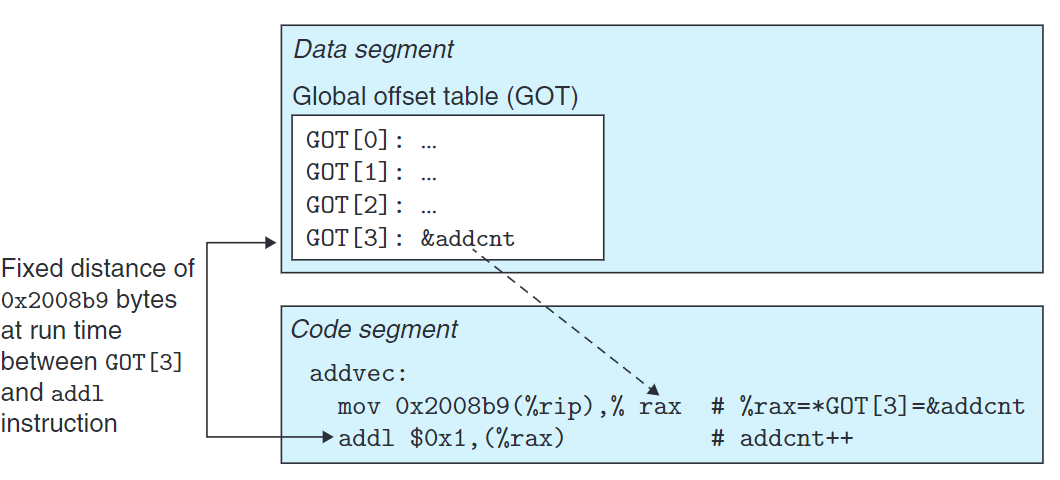
編譯器通過以下事實生成對全局變量的PIC引用:無論在內存何處加載目標模塊,數據段與代碼段的距離總是保持一致。
編譯器會在數據段的開始處創建一個全局偏移量表(Global Offset Table, GOT),每個引用全局變量的目標模塊都有自己的GOT。
在GOT中,每個被目標模塊引用的全局變量都有一個8字節條目,且每個條目都有一個重定位紀錄。加載時,動態鏈接器會重定位GOT中的每個條目,使其包含目標的絕對地址。
下圖展示了libvector.so共享模塊的GOT。addvec通過GOT[3]加載addcnt並加一。這裡的關鍵思想是對GOT[3]和PC相對引用中的偏移量是一個常量。
PIC函數調用
GNU通過延遲綁定(lazy binding) 將函數地址的解析推遲到實際被調用的時候。
延遲綁定通過兩個數據結構的交互實現:GOT和過程鏈接表(Procedure Linkage Table, PLT)。
若目標模塊調用了共享庫中的函數,它就會擁有自己的GOT和PLT表。GOT存在數據段,PLT存在代碼段。
PLT是個數組,每個條目是16字節代碼,每個被程序調用的庫函數都有自己的PLT條目。PLT[0]是特殊條目,負責跳轉到動態鏈接器中。PLT[1]調用系統啟動函數__libc_start_main。從PLT[2]開始的條目才是用戶代碼調用的函數。
GOT和PLT聯合使用時,GOT[0]和GOT[1]包含動態鏈接器在解析函數地址時需要使用的信息,GOT[2]是動態鏈接器在ld-linux.so模塊中的EP。剩餘條目都有對應的PLT條目,且剩餘GOT條目對應每個被調用的函數,而函數的地址在運行時才會被取得。所以初始時,每個GOT條目都指向對應PLT條目的第二條指令(該指令將函數ID入棧,幫助取得函數地址)。
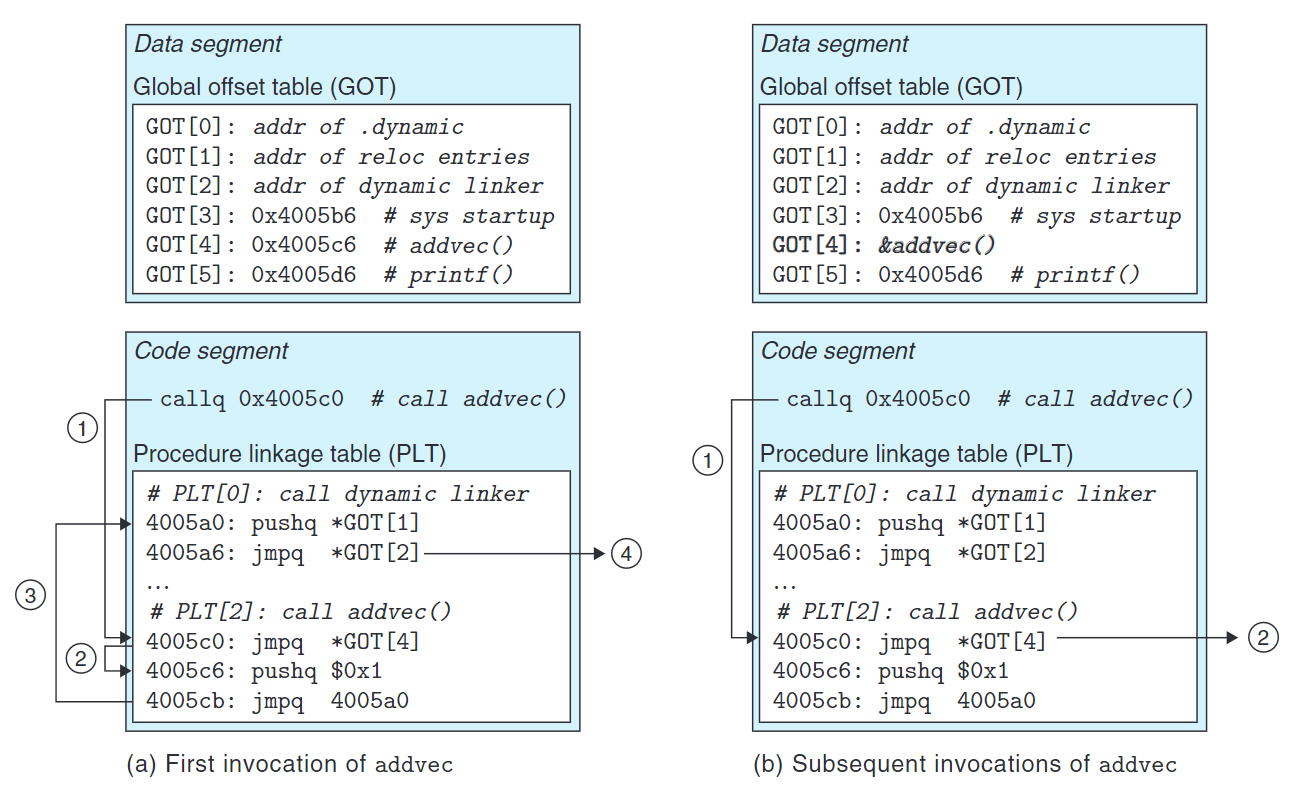
上圖展示了GOT如何和PLT協作。
當addvec第一次被調用,延遲解析運行時地址:
- 程序調用
addvec時跳轉到PLT[2](addvec的PLT條目)。 - 跳轉到
GOT[4],此時GOT[4]因為還未取得addvec的運行時地址,所以指向PLT[2]的下一條指令。將0x1(addvec的ID)入棧。 - 跳轉到
PLT[0],將GOT[1](重定位入口)入棧。 - 跳轉到
GOT[0](動態鏈接器的EP),讀取棧中兩個參數並取得addvec的運行時地址。最終將該地址寫回GOT[4],並調用addvec。
當addvec不是初次調用:
- 跳轉到
PLT[2]。 - 跳轉到
GOT[4],因為其已經擁有addvec運行時地址,會直接調用addvec。
庫打樁機制
庫打樁(library interpositioning) 允許用戶擷取對共享庫的調用,取而代之執行自己的代碼。
打樁可以發生在編譯時,鏈接時或運行時。
以下僅介紹運行時打樁。
運行時打樁
運行時打樁依賴於環境變量LD_PRELOAD,若該值被設置為一個共享庫路徑名的列表,則當執行程序解析未定義引用時,動態鏈接器會先搜索LD_PRELOAD庫才去搜索其他庫。有了這個機制,才使得我們可以在運行時打樁。
同時,我們還要知道一個偽句柄RTLD_NEXT。當執行dlsym時將該偽句柄傳入,可以獲得鏈接順序中”下一個”定義了該符號的函數地址(下一個才是真正的函數地址,當前這個是我們自己定義的函數)。
1 | /* mymalloc. */ |
1 | /* int.c */ |
以下指令構建包裝函數的共享庫:
1 | gcc -DRUNTIME -shared -fpic -o mymalloc.so mymalloc.c -ldl |
以下指令編譯主程序:
1 | gcc -o intr int.c |
以下是如何從shell運行程序
1 | LD_PRELOAD = "./mamalloc.so" ./intr |






![[GAMES 101] Rasterization 筆記](/pictures/SAO.jpg)


