CSAPP U5 筆記與(部分)練習題解答
優化編譯器的能力和侷限性
編譯器只能對程序使用安全的優化。例如以下代碼:
1 | void twiddle1(long *xp, long *yp) { |
以上兩函數看起來實現的功能相似。的確,當*xp與*yp指向兩個不同的內存地址時兩個函數的行為相同。但如果兩個指針指向相同的內存地址,則twiddle1()會把值翻4倍,而twiddle2()只會把值翻3倍。
這種兩個指針可能指向同一個內存位置的情況稱內存別名使用(memory aliasing),會嚴重限制編譯器優化代碼性能。
還有一個妨礙優化的因素是函數調用,考慮以下代碼:
1 | long f(); |
直覺上可能會認為以上兩函數具有相同的行為,但是如果f()的結果跟隨其執行次數上升而有不同的執行結果時,二函數的返回值則會有所不同。
練習題
5.1
*xp與*yp的值都為0。
5.2
數學問題,此略。
表示程序性能
我們使用每元素的周期數(Cycles Per Element, CPE) 表示程序性能。
程序示例
我們定義一個向量數據結構:
1 | typedef struct { |
其中,data_t是我們自行使用typedef定義出來的數據類型。
接著,我們定義一個函數,它的作用是對向量做一系列操作。之後都會針對這個函數進行一系列優化。
1 | void combine1(vec_ptr v, data_t *dest) { |
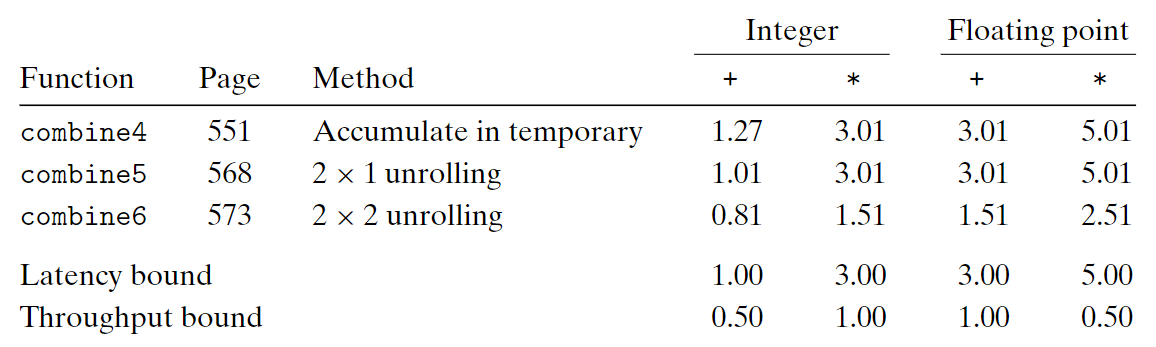
對以上代碼在具有Intel Core i7 Haswell的參考機上測試,得到以下結果(單位為CPE)。

消除循環的低效率
在combine1()中,我們調用函數vec_length()作為for循環的邊界條件。由於向量的長度不會在此函數運行期間改變,所以每次循環都調用函數取得向量長度屬於浪費,我們將取得向量長度的代碼移動到循環外。
1 | void combine2(vec_ptr v, data_t *dest) { |

可以看到性能有了略微提升。我們稱這種優化代碼移動(code motion)
減少過程調用
combine2的代碼給次循環都調用get_vec_element()獲取元素,非常低效。我們新設計一個函數get_vec_start()作為替代,然後使用數組形式訪問數據。
1 | void combine3(vec_ptr v, data_t *dest) { |

可惜,這次改動反而讓性能變得更差。循環中的其他操作造成瓶頸,限制性能超過調用get_vec_element()。
消除不必要的內存引用
在combine3中,每次循環都需要從內存中讀取*dest的值。為了消除這種不必要的內存引用,我們引入一個臨時變量acc:
1 | void combine4(vec_ptr v, data_t *dest) { |

這次程序性能有了顯著提升。
練習題
5.4
A. %xmm0在-O2中當累積者,在-O1中當臨時變量。
B. 是的。
C. 因為每次循環開頭讀取的值與循環末尾寫入的值相同,所以可以這樣變化。
理解現代處理器
有兩種下界限制了程序的最大性能:
- 延遲界線(latnecy bound):數據相關導致下一條代碼執行前,當前代碼必須先執行完。
- 吞吐量界線(throughput bound):處理器功能單元的原始計算能力。
整體操作
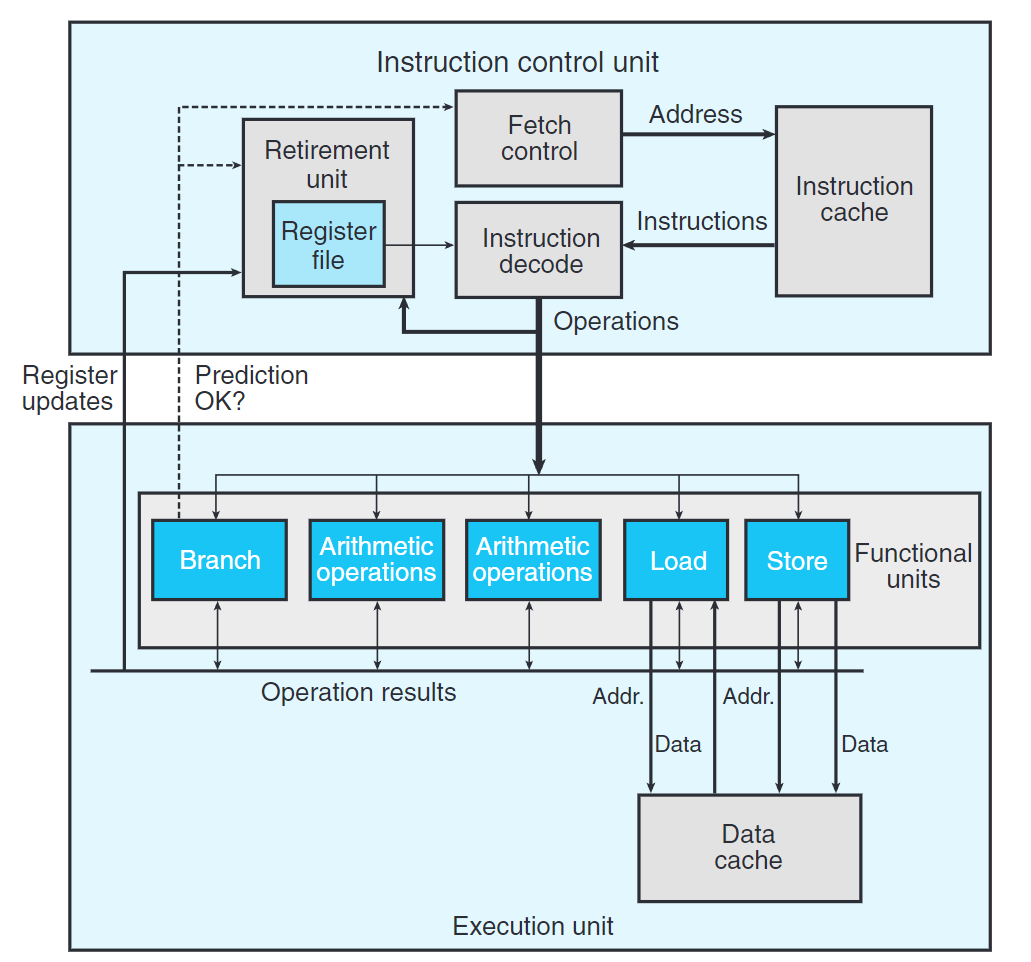
上圖示現代微處理器的簡化版示意圖。這種處理器稱為超標量(superscalar),可以在一個時鐘周期內執行多個操作,而且是亂序(out-of-order) 的。
整個設計分為兩個部分:
- 指令控制單元(Instruction Control Unit, ICU):從內存讀出指令序列,據此生成針對程序數據的基本操作。
- 執行單元(Execution Unit, EU):執行ICU生成的操作。
ICU從指令高速緩存(instruction cache) 中讀取指令。通常ICU會在當前執行指令的很早之前取指,這樣它才有時間對指令譯碼並發送到EU。
當程序遇到分支,ICU使用一種稱為分支預測(branch prediction) 的技術。通過投機執行(speculative execution) ,處理器會在確定分支正確性前開始執行這些指令。如果之後發現預測錯誤,會將狀態重新設置道分支點的狀態,並取出正確的指令。標記為Fetch Control的塊包括分支預測,以確定取出那些指令。
Insturction Decode 接收程序指令,並將它們轉換成一組基本操作(或稱微操作)。
1 | addq %rax, %rdx |
以上代碼在典型x86實現中,會被轉化成一個操作。
1 | addq %rax, 8(%rdx) |
以上代碼則會被轉換成三個操作,一個讀內存值,一個將%rax與內存值相加,一個寫內存值。
EU接收來自取指單元的操作。這些操作被分派到功能單元(Functional Units) 中並執行實際操作。
讀寫內存由加載和存儲單元實現,通過數據高速緩存(data cache) 來訪問內存。
使用投機執行技術對操作求值,但結果暫時不會存放回寄存器或內存中。當分支操作送到EU,確定分支預測正確性後,若錯誤則丟棄計算結果,否則將數據寫回存儲器。
算術運算(Arithmetic operations) 塊通常不只一個,使得操作可以並行運行。
ICU中的退役單元(retirement unit) 控制著指令的結束。譯碼時,指令被放在對列中,直到分支預測正確而退役,或分支預測錯誤而被清空(flushed),此時丟棄計算出來的結果。
控制操作數在執行單元間傳送的機制稱為寄存器重命名(register renaming)。
功能單元的性能
延遲(latency):完成運算所需的總時間。
發射時間(issue time):兩個同類型指令連續執行之間所需的最短周期數。
容量(capacity):能執行該計算的功能單元數量。
完全流水線化(fully pipelined):發射時間為1者。
吞吐量:發射時間的倒數。
練習題
5.5
A. $2n$次加法(答案說$n$次,我猜他省略了整數加法i++),$2n$次乘法
B. 循環中消耗最大的是a[i] * xpwr和x * xpwr,而這兩個乘法可以並行,占五個時鐘週期。而result和x沒有依賴關係,可以將加法放到下次迭代計算,所以CPE為5。
5.6
A. $n$次加法,$n$次乘法。
B. 此函數中result和x有先後依賴關係,不可將本次迭代的計算延遲到下次迭代計算。所以CPE為$5+3=8$。
C. 5.5沒有數據冒險。
循環展開
循環展開通過增加每次迭代計算元素的數量,減少循環迭代的次數。
循環展開從兩方面增進程序的性能:
- 減少不直接參與結果計算的操作數量,例如循環索引計算或條件分支。
- 循環展開提供一些方法進一步變化代碼,減少計算中關鍵路徑上的操作數量。
若將一個循環按任意因子$k$展開,稱$k\times 1$循環展開。
我們令向量長度為$n$,則此循環的上限應為$n-k+1$,且循環內對元素$i$到$i+k-1$應合併運算。每次迭代索引$i$加$k$。
由於最大循環索引$i+k-1$會小於$n$,所以我們需要第二個循環,每次循環處理一個元素直到最後。此循環會執行$0\sim k-1$次。
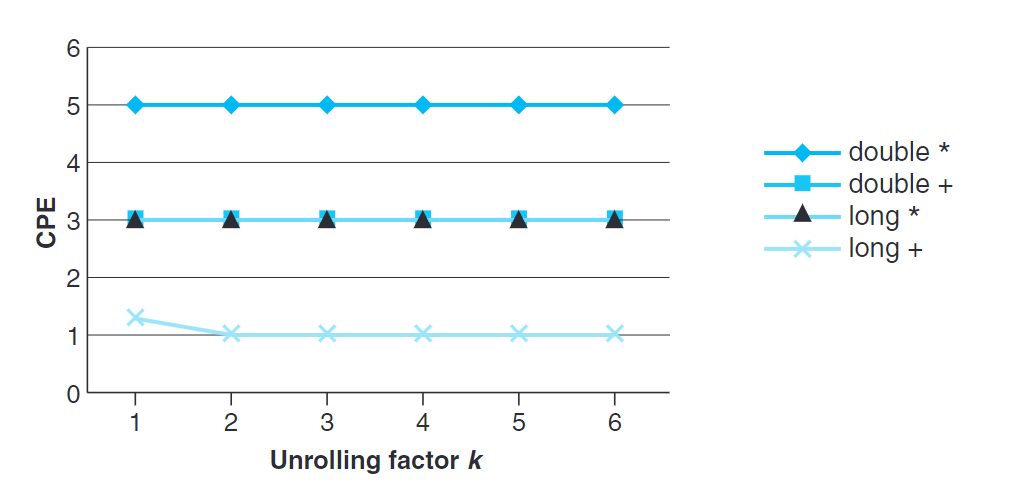
觀察上圖我們可以發現,這種變換只改進了整數加法的性能。
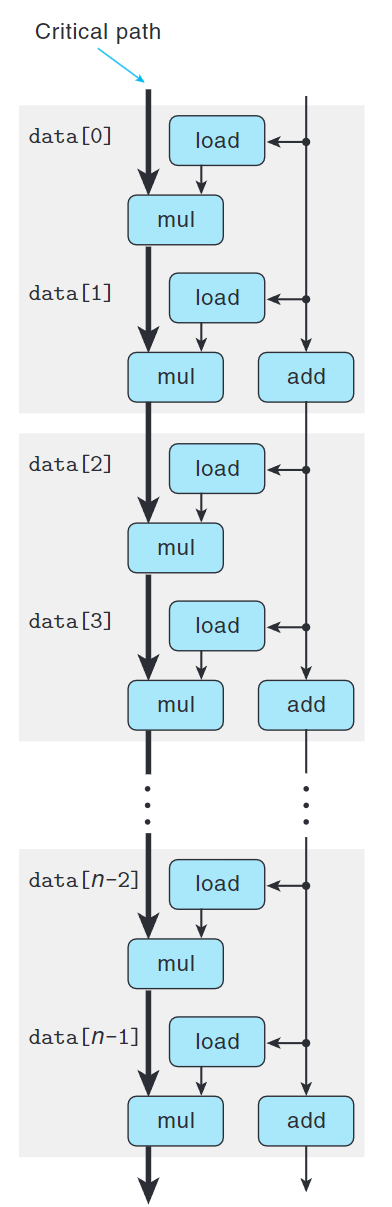
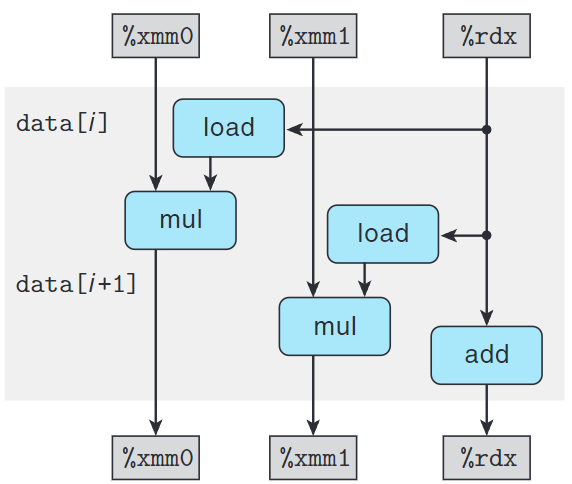
假設操作為double的乘法,每次操作需要從內存中加載一個數組元素並將這個值乘以累積值。
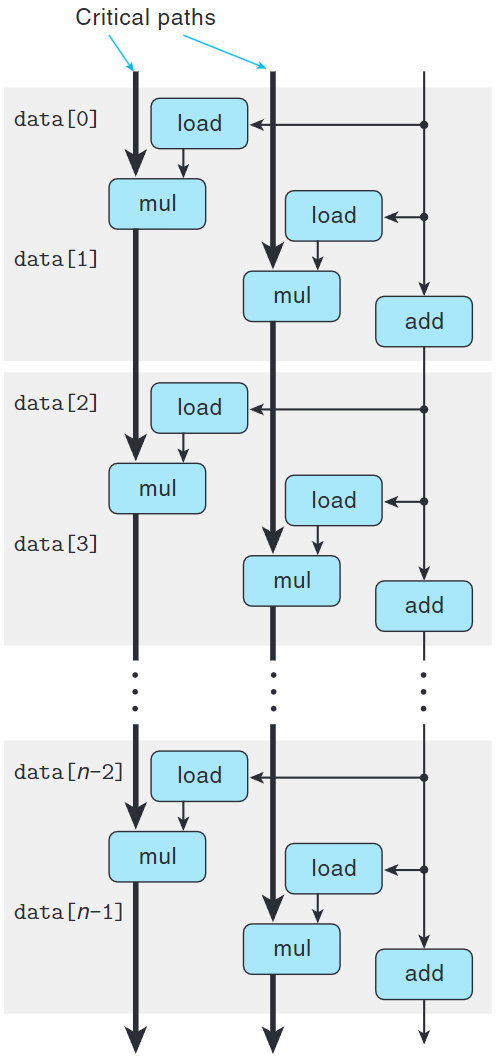
通過上圖我們可以觀察出,雖然關鍵路徑上迭代的次數減半,但是每次迭代中仍有兩個順序的乘法操作,這就是限制性寧提升的關鍵。
練習題
5.7
1 | void combine5(vec_ptr v, data_t *dest) { |
提高並行性
由於我們將累積值放在單個變量中,在前面的計算完成前,都不能計算acc的新值,導致性能被限制。
多個累積變量
通過將偶數元素積累在acc0中,將奇數元素累積在acc1中,我們可以實現$2\times 2$循環展開。
1 | void combine6(vec_ptr v, data_t *dest) { |
上表可知我們打破了延遲界線,代表我們不需要延遲一個加法或乘法以等待上一個操作完成。
可以看到關鍵路徑上的操作減半,所以對比combine5和combine6可以發現CPE幾乎砍半。
我們可以通過將循環展開$k$次,並行$k$次得到$k \times k$循環展開。
通常,只有所有執行該操作的功能單元的流水線都是滿的時,程序才能達到吞吐量界線。
對延遲$L$,容量$C$的操作而言,要求循環展開因子$k \geq C \cdot L$。
例如,浮點乘有$C=2, \ L=5$,則循環因子為$k \geq 10$。
重新結合變換
考慮將combine5中的:
1 | acc = (acc OP data[i]) OP data[i+1]; |
括號修改順序形成新函數combine7:
1 | acc = acc OP (data[i] OP data[i+1]); |
這種行為我們稱為重新結合變換(reassociation transformation)。
因為括號改變元素與累積值acc的合併順序,我們稱$2\times 1a$循環展開。
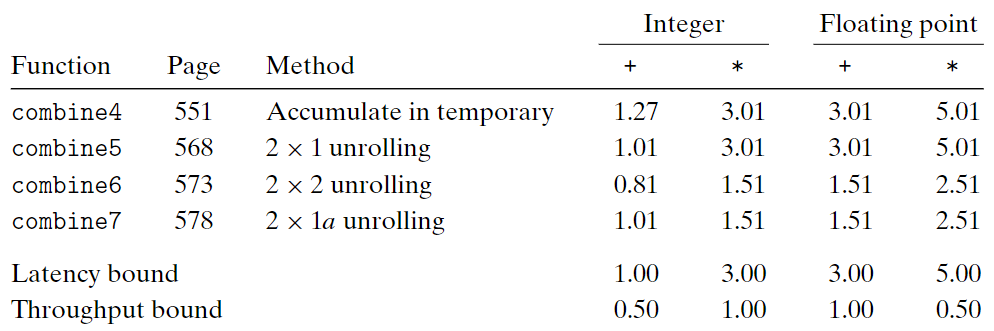
之所以會有這樣的提升是因為後者解除了數據依賴。
練習題
5.8 CPE = 5P/3
A1: 5.00
A2: 3.33
A3: 1.67
A4: 1.67
A5: 3.33
一些限制因素
寄存器溢出
如果我們的並行度$p$超過可用的寄存器數量,那麼編譯器會訴諸溢出(spilling),將某些臨時值存放在內存中,通常在運行時堆棧上分配空間。
一旦編譯器必須訴諸溢出,那維護多個寄存器的優勢就可能會消失,使CPE上升。
分支預測和預測錯誤處罰
因為條件傳送指令可以被實現為普通指令流水線化處理,沒必要猜測條件是否滿足,所以沒有猜測錯誤處罰。
因為條件傳送指令不會改變PC,且現代處理器可以亂序執行,所以流水線可以先運行其他指令,等條件傳送指令計算完再執行該指令。
現在我們關心如何保證分支預測處罰不會阻礙程序效率?
- 不用過分關心可預測的分支:例如可預測的邊界檢查
- 書寫適合用條件傳送實現的代碼
之前說過條件傳送指令不會因預測錯誤而受處罰。所以如果可以,我們想要用條件重送指令替代分支。即,使用功能式指令替代命令式指令。
1 | void minmax1(long a[], long b[], long n) { |
以上代碼minmax2()更容易被編譯成條件傳送指令。
練習題
5.9
1 | long min = src1[i1] < src2[i2] ? src1[i1++] : src2[i2++]; |
理解內存性能
加載的性能
我們可以簡單編寫一系列互相依賴的加載操作來計算加載性能:
1 | long list_len(list_ptr ls) { |
1 | .L3: |
可以觀察出movq是循環中的性能瓶頸。後面的%rdi值都依賴於這個操作。在參考機上我們測得CPE為4.0,與參考機中L1級cache的4週期訪問時間一致。
存儲的性能
存儲操作不影響任何寄存器值,除非有加載操作否則不會產生數據相關。
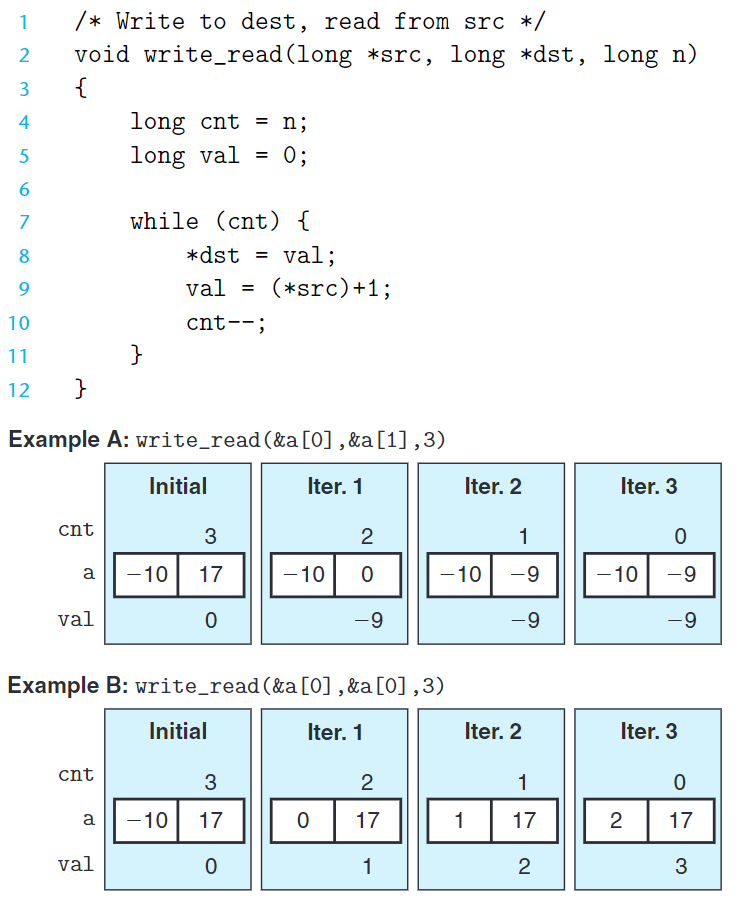
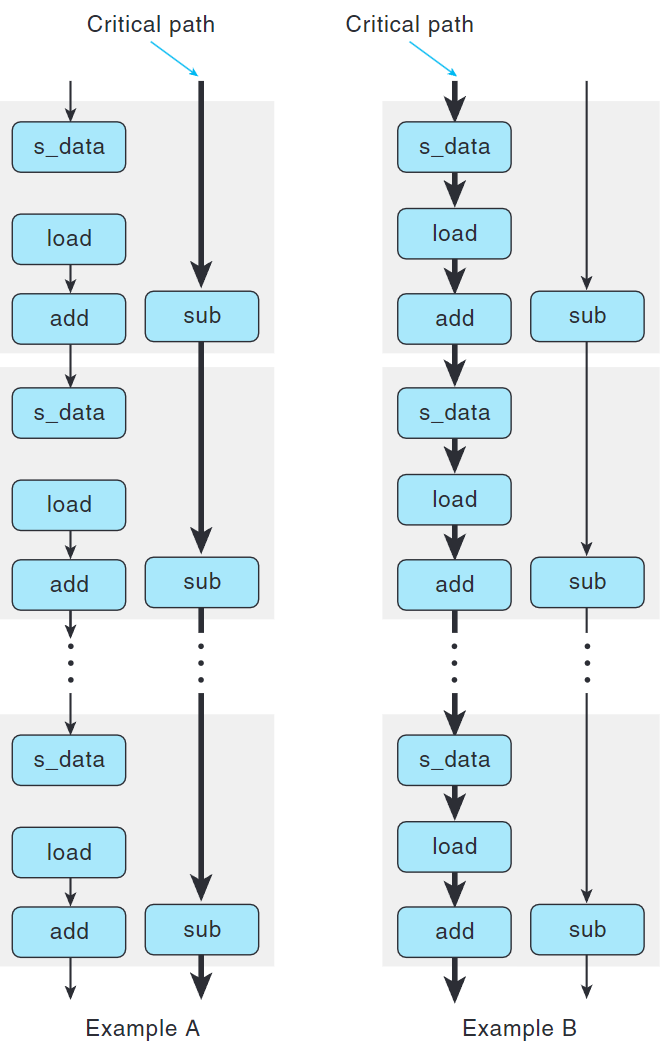
由於Example A沒有產生寫/讀相關(write/read dependency) 所以CPE較小,CPE=1.3。
而Example B產生寫/讀相關所以CPE較大,CPE=7.3。
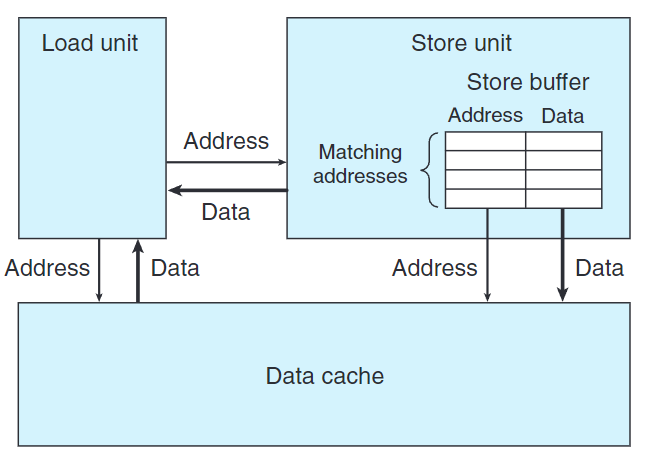
上圖是加載和存儲執行單元。
存儲單元包含一個存儲緩衝區(store buffer),它包含已經被發射到存儲單元但還沒完成(包括更新數據高速緩存)存儲操作的地址和數據。
write_read()內循環匯編碼如下:
1 |
|
其中,movq %rax, (%rsi)被拆分成兩步:s_addr計算地址,並在存儲緩衝區創建該條地址目的條目。s_data設置該條目的數據。
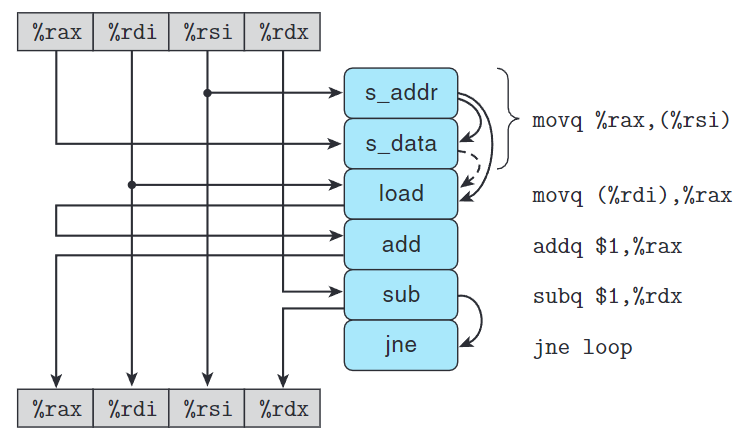
s_data和load有數據相關,但是有條件:如果地址相同,load必須等s_data將數據放入緩衝區。如果地址不同,兩個操作可以獨立運行。
練習題
5.10
A. a全項左移
B. a全項被設為a[0]
C. B沒有寫/讀相關
D. CPE=1.2,因為沒有寫/讀相關,所以與A同
5.11
此次寫入的p[i]在i自增後,與下次的p[i-1]代表同一地址。產生寫/讀相關。
5.12
1 | void psum(float a[], float p[], long n) { |
確認和消除性能瓶頸
Unix系統提供一個程序剖析(profiling) 的工具GPROF。
我們需要為需要剖析的程序添加標誌-Og和-pg:
1 | gcc -Og -pg prog.c -o prog |
然後正常執行:
1 | ./prog |
它會產生一個文件gmon.out,且通常會運行的比正常慢2倍。
調用GPROF來分析gmon.out中的數據:
1 | gprof prog |
需要注意,對於運行時間少於1秒的程序GPROF的計時不準確。






![[GAMES 101] Rasterization 筆記](/pictures/SAO.jpg)


